
LiDAR or Light Detection And Ranging is an optical remote-sensing technique that makes use of laser to sample Earth’s surface. Highly accurate point cloud datasets are produced by LiDAR that can be visualized and analyzed using CAD tools (for example ArcGIS).
Terms and Definitions
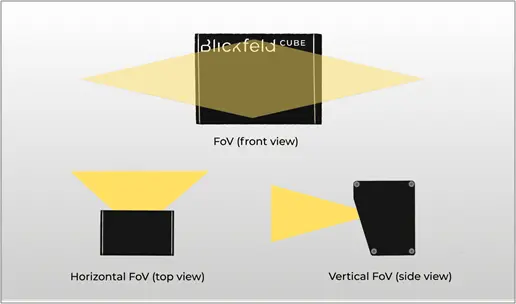
Field of View (FoV)
Field of View is the angular range in which LiDAR sends out pulses.
Scanning Frequency (SF)
Scanning frequency or SF is the number of pulses a LiDAR generates in one second. For instance, a scanning frequency of 10Hz means 10 pulses per second. A typical eye-safe LiDAR will have a frequency of 200 THz.
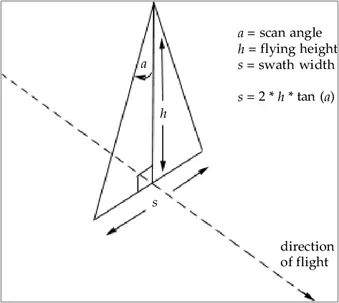
Scan Angle (Θ)
Scan angle is the sideways angle that represents the rotation position of the laser pulse. It spans between -90o (left side) and 90o (right side) where zero degrees shows the exact downward vertical position of the laser.
Scan Rate (SR)
Scan Rate of a LiDAR is the number of points it acquires per second. It differs from scanning frequency which is the number of pulses sent by LiDAR every second, whereas, SR can vary depending upon the number of returns per pulse. So, if we are set for one strongest return, then scan rate and scanning frequency match.
Wavelength (λ)
LiDAR works by sending light generated by Laser and acquires surface data by receiving the back-scattered light. This light is spread over a large spectrum of wavelengths. The following wavelength ranges are being used by LiDAR:
- Infrared
- 1500-2000 nm
- Used for meteorology and other scientific uses
- Near-infrared
- 850-940 nm
- Used for terrestrial mapping
- Blue-red
- 500-750 nm
- Bathymetry (measurement of depth of water)
- Ultraviolet
- 250 nm
- meteorology
Basic Working Principle
LiDAR sensor sends out laser signals to a target (an object on the ground in case of terrestrial mapping). The laser beam is reflected back and analyzed to acquire the time taken for it to get back. Using this information, distance from the object can be calculated.
Use of LiDAR in Terrestrial Mapping
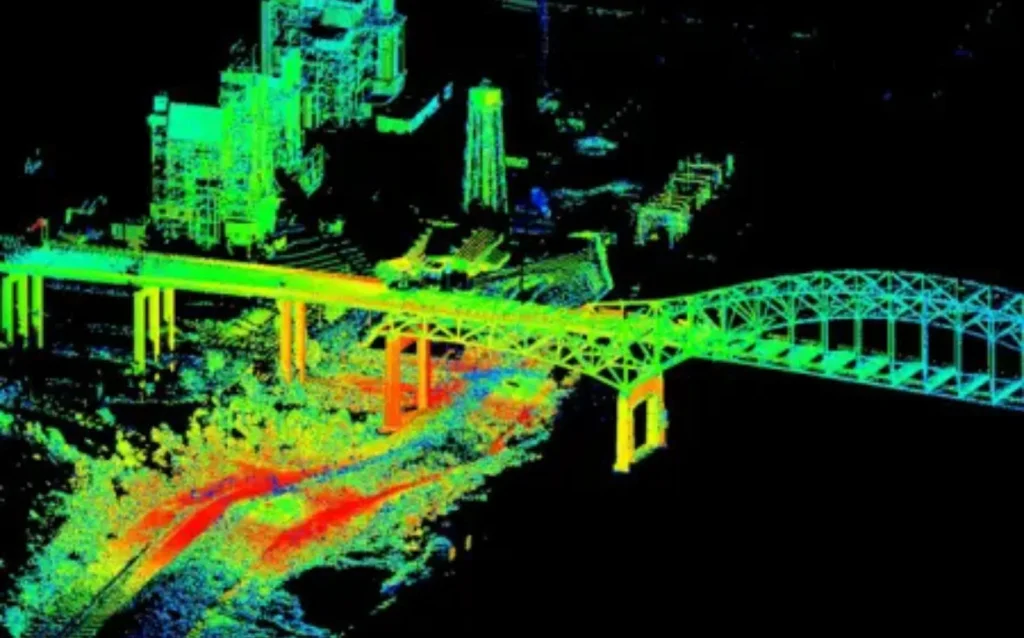
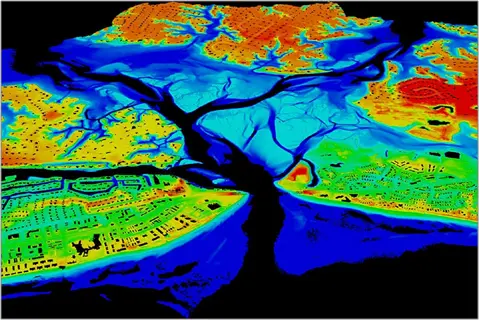
Using the complementary information of GPS and IMUs (Inertial Measurement Unit), the exact location of the object can be found in 3D space. This provides us with a very accurate mapping of a given terrain as illustrated in the image below:
Multiple Returns
The laser pulse that is received first is the most considerable return and is used to attribute with the major feature of the object being scanned.
A lot of LiDARs use only the first returns of any given pulse. However, the transmitted pulse may strike other parts of the object as well which results in weaker and delayed returns.
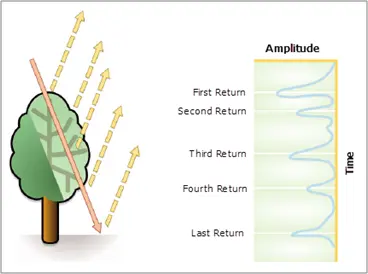
If the LiDAR system is capable of handling multiple returns, this can help build a better visualization because you can actually visualize parts of the terrain that are blocked by different objects.
SPiA and MPiA
Single-Pulse-in-air or SPiA LiDAR systems are those systems that transmit a single pulse and wait for the return before the next pulse is transmitted. In this way, specific returns can be attributed to a specific pulse. The drawback of such system is the time delay that could have been used for acquiring more data in that duration.
Multiple-Pulse-in-air or MPiA LiDAR systems allow multiple pulses simultaneously without waiting for the returns from a single pulse. The benefits of multiple pulse transmission are less acquisition time and high resolution imagery.
Laser Classification
Lasers in general are classified into different classes based on their power. The following table gives a brief overview of the classes into which lasers are sorted:
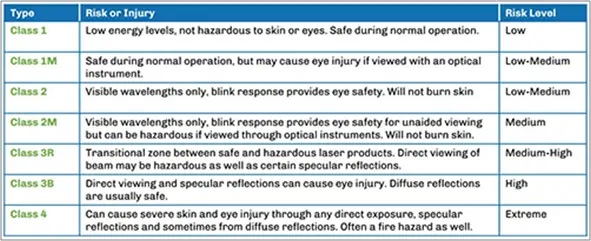
As a general rule, the LiDAR systems use class 1 optical lasers because of their low energy levels and low risk factor.
LiDAR Output Format
LiDAR data is generally given in two formats i.e. LAS and LAZ. LAS format is a public file format that is used for storing information of 3D point cloud, specified by the American Society for Photogrammetry and Remote Sensing (ASPRS).
It is a binary file containing data specific to LiDAR. LAZ is the compressed version of LAS format. The typical sections in an LAS file structure are shown here:

Components of an Integrated LiDAR System
High-Speed Clock
A high speed clock is used to measure the time between laser pulse transmission and corresponding reception. This value is then used for the calculation of distance of the target object from LiDAR.
The precision of clock is very crucial in keeping the exact time for transmission and reception that is why precision electronics is used to design timing system.
Global Positioning System (GPS)
GPS is used to find the exact x, y and z coordinates of the scanner. This value coupled with the adjustment by using ground station reference and the angular data from IMU, provides the exact location of each point in the point cloud generated by LiDAR.
Inertial Measurement Unit (IMU)
A typical IMU consists of accelerometers, gyroscopes and magnetometers that are employed to acquire the orientation of the scanner and the effect of gravitational forces on the system.
It calculates the movement values (pitch, yaw and roll) of the aircraft in real-time. This data is also used by the GPS to acquire the exact location of each acquired point on Earth.
Laser Source and Detection Mechanism
Laser generates the energy required for the pulses. For most terrestrial mapping applications, near infrared band is used (as mentioned in section above). Due to the nature of LiDAR usage, the lasers used in such systems are of low energy class and safe for human eye.
A Scanning mechanism is also part of the system that is used to generate continuous set of pulses. To receive the back-scattered signals, laser detector or receiver is present as well.
Computational Unit
To maintain the functioning of individual components of the LiDAR system and to integrate the data acquired from Laser Scanner, GPS and IMU, a computational unit is present on board.
The data acquired from individual components is then used to generate point data. Furthermore, flight and path planning is also an essential task performed by the computational unit.
Useful Links for Further Guidance
- http://gsp.humboldt.edu/OLM/Courses/GSP_216_Online/lesson7-1/components.html
- https://www.generationrobots.com/blog/en/what-is-lidar-technology/
- http://web.pdx.edu/~jduh/courses/geog493f12/Week04.pdf
- https://pro.arcgis.com/en/pro-app/latest/help/data/las-dataset/what-is-lidar-.htm
- https://en.wikipedia.org/wiki/LAS_file_format
Facing challenges with LiDAR technology integration or electronic product development in general? Feel free to Contact Us for sensor hardware design, embedded solutions, and firmware integration expertise.
