
A Beginner’s Guide to Millimeter-Wave (mmWave) Radar Technology – Applications and Advantages

Millimeter-wave radar (or mmWave radar) is a class of radar technology that operates in the 30 GHz to 300 GHz frequency range. This offers unique advantages in applications ranging from automotive to meteorological systems. Introduction to Millimeter-Wave Radar Millimeter-wave (mmWave) radar operates on electromagnetic waves with wavelengths ranging from 1 millimeter to 10 millimeter […]
Ensuring Reliability of Safety Critical Software with MISRA
In safety-critical software systems—deployed in industries like medicine, automotive, and space—a single programming error can have dire consequences, from significant financial losses or potential loss of human life. This is where the MISRA standard comes into play. It is specifically designed for safety-critical systems, ensuring they meet stringent security and reliability requirements. The Need for […]
Solving RTOS (Real Time Operating System) Limitations with Active Objects in Embedded Systems
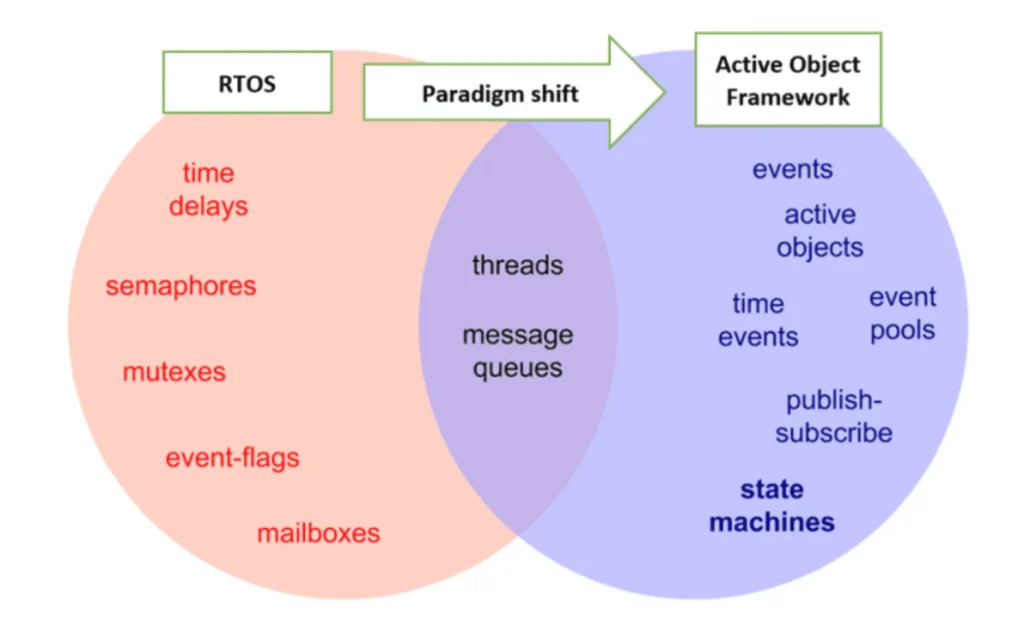
In embedded systems, Real-Time Operating Systems (RTOS) are designed to synchronize thread execution with specific events, often through blocking and waiting for designated occurrences. However, this approach has its drawbacks. Blocked threads become unresponsive to events they haven’t explicitly waited for, leading to the creation of more threads to handle additional events. But this […]
How to Avoid System Failure Caused by Collisions in RTOS – Introducing Mutual Exclusion
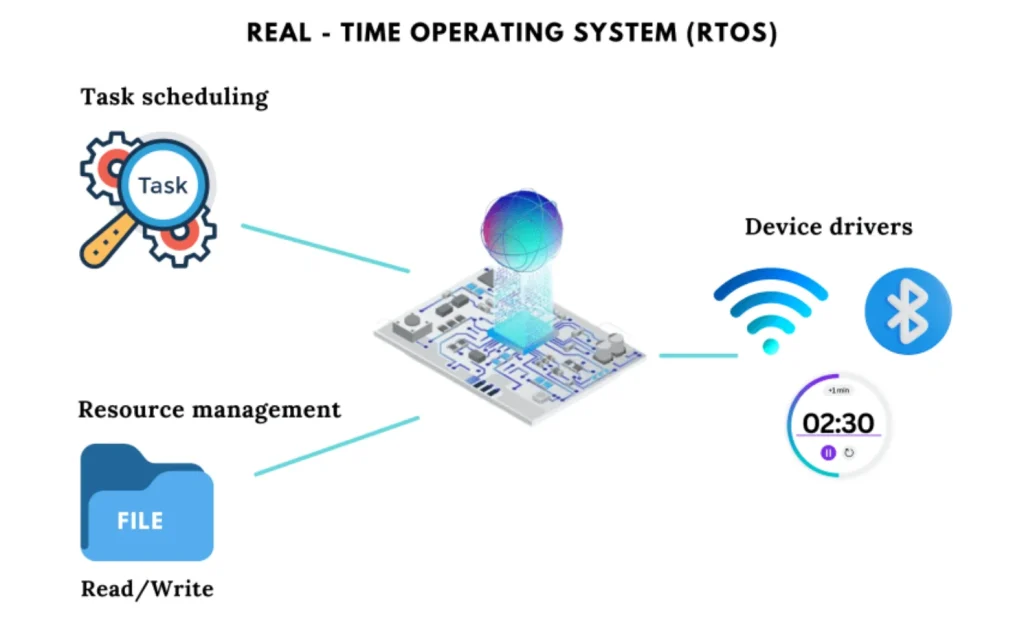
Real-Time Operating Systems (RTOS) are susceptible to system failure due to challenges like data/time collisions and race conditions. Unlike large desktop or server systems, such as Windows or Linux, where processes stay in their separate address spaces, RTOS threads all run together in the same address space. These threads often share resources like variables, […]
Over-the-air (OTA) updates: A boon to connected devices

1. Introduction In today’s increasingly connected world, over-the-air (OTA) updates are becoming essential for keeping devices secure and up to date. OTA updates allow software developers to deliver new features, bug fixes, and security patches to devices without requiring users to physically connect them to a computer or other device. OTA updates work by […]
Introduction to Bootloaders: A Guide for Embedded Developers for Efficient Firmware Updates

Introduction: A bootloader is a small piece of software that is responsible for starting up a device and loading the operating system or application program. It is typically stored in non-volatile memory, such as ROM or flash memory, so that it is not erased when the system is turned off. What does a bootloader […]
What is EU MDR (European Medical Device Regulation)? – A Guide for Medical Device Manufacturers

1. Introduction The EU MDR (Medical Device Regulation) is a new regulation that governs the production and distribution of medical devices in the European Union. It came into effect on May 25, 2021, and replaced the MDD (Medical Devices Directive) and AIMD (Active Implantable Medical Devices Directive). The MDR introduces more stringent requirements for […]
Your Step-By-Step Guide for Performance-Level Calculations of Safety-Critical Electronics
1. Introduction If you are a designer of an electronic system and you need to understand how well your system reacts to a state that can cause harm to a human being (a battery pack catching fire due to cell overvoltage or cell over temperature), it is useful to calculate a “Performance Level”. This […]
Common JTAG Connectivity Issues and How to Solve Them (A Designer’s Perspective)
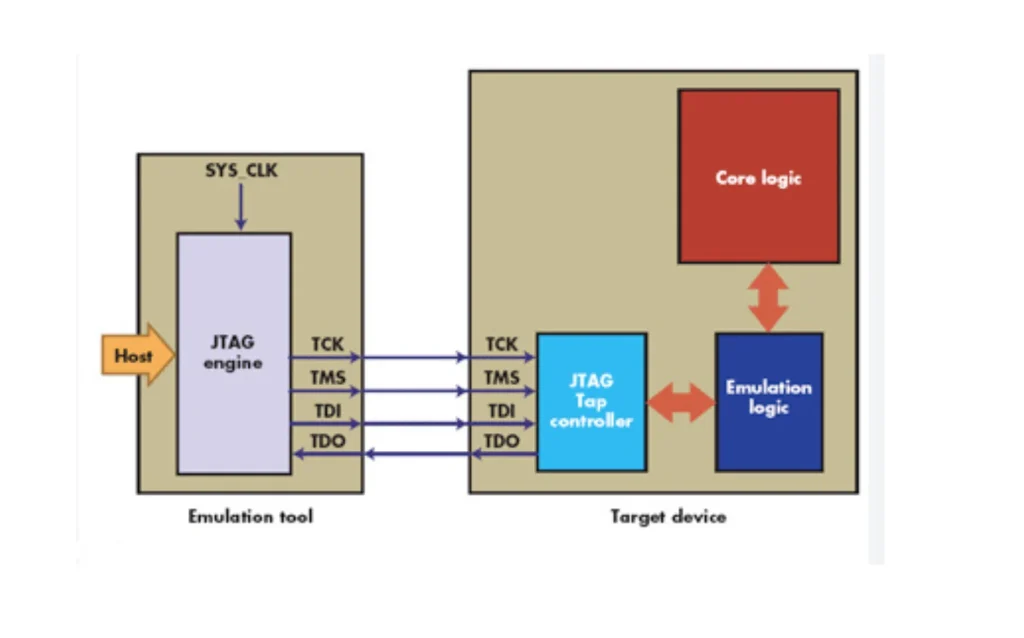
Why Do We Need JTAG? With recent advancements in technology and shrinking device sizes, it becomes more difficult to be able to test the design and the underlying circuitry. There’s often no space available to attach probes or have test ports if you have to examine the performance and functionality of the device. That’s where […]
How to Write A Driver for Accelerometer LIS3DSH in Zephyr?
In our previous Zephyr blog, we looked at how to interface a simple IMU – Accelerometer sensor with Zephyr RTOS running on NRF52832. Knowing how to interface sensors over SPI protocol allows user to communicate with sensor’s register and get values for acceleration. We saw how we can create our own library for the sensor, […]